Aside from being fun to make, bionic limbs can be used for people who may have lost a limb for a variety of reasons. Maybe they were born without a limb or maybe it was not fully formed, they may have lost it in war or maybe they had an accident.
At the moment, Bionic Limbs are very expensive, so a lot of research is being put into them to try and find cheaper ways to make them and make them more convenient and comfortable for users.
They can also be used to make robots and, like what your finger can do, will be able to mirror your movements.
Components
Flex Sensor
This measures the movement of your finger and then turns it into something Arduino code to read which makes the Micro Servo move. It is the part that makes the Finger moved based on your finger's movements.
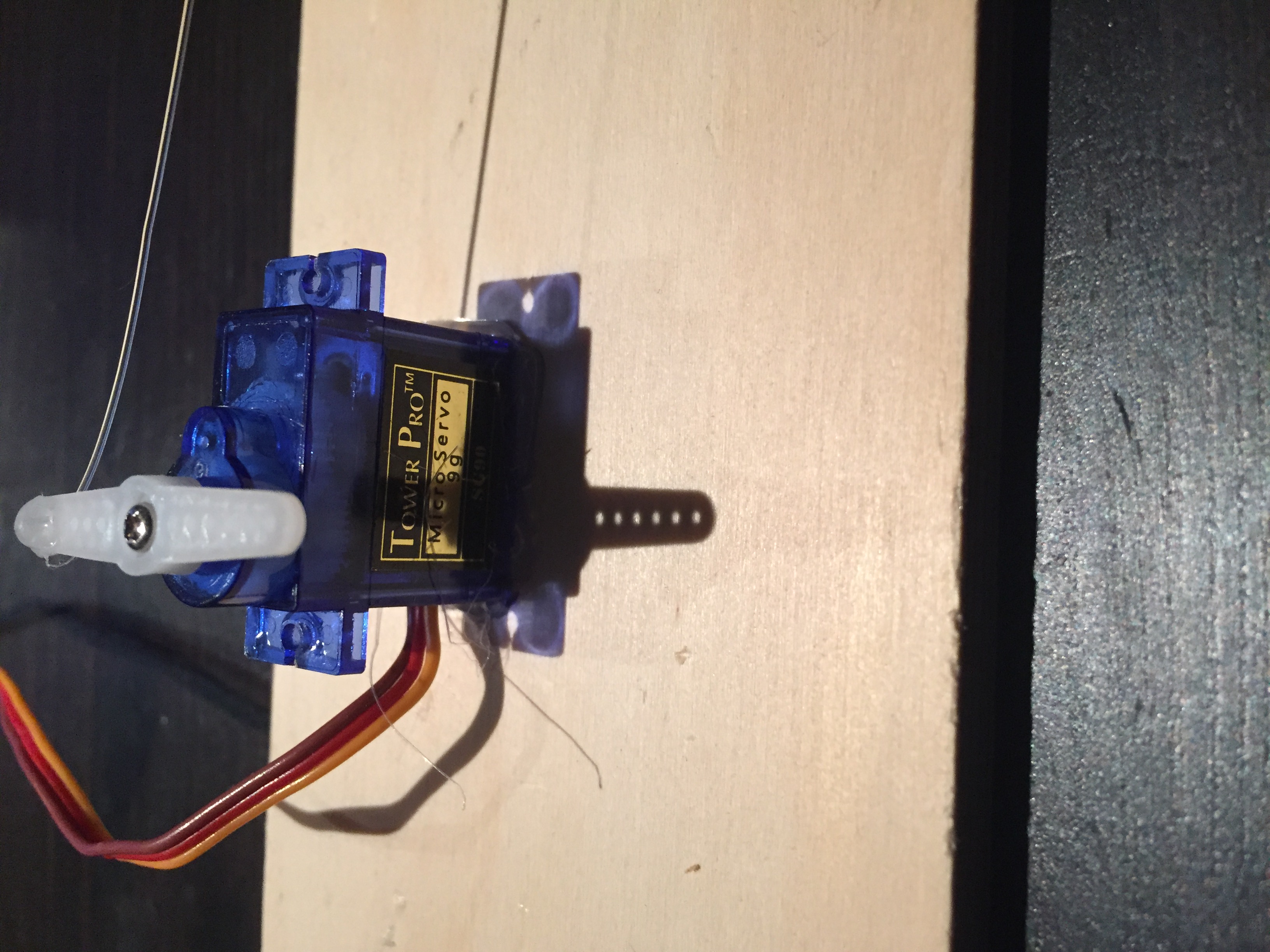
Micro Servo
A little motor that tightens the Fishing Wire (to make the finger move) based on information from the Flex Sensor.
Battery
Powers the Arduino/Finger. You can plug it into a computer or a power socket, but this tutorial will use a 9 Volt Battery.
USB Wire
Lets you transfer your code from your computer to your Arduino. Note: depending on which laptop you have, you might need an adapter to connect the USB Wire to your laptop.
Finger
This tutorial uses a 3D printed finger (which will be doing the moving) but you can use a straw or cardboard finger. Basically, anything that you can attach a string to which can be pulled by the Micro Servo.
Wooden Board (optional)
Stick the finger and the Arduino down to it to make it easier to function and you don't have to stretch it every time. You can use anything that is rigid which you can stick your finger to.
Fishing wire
Can be pulled tighter to make the finger bend and straighten. You can also use string or anything that is thin and flexible. Preferably not elastic but you could always experiment!
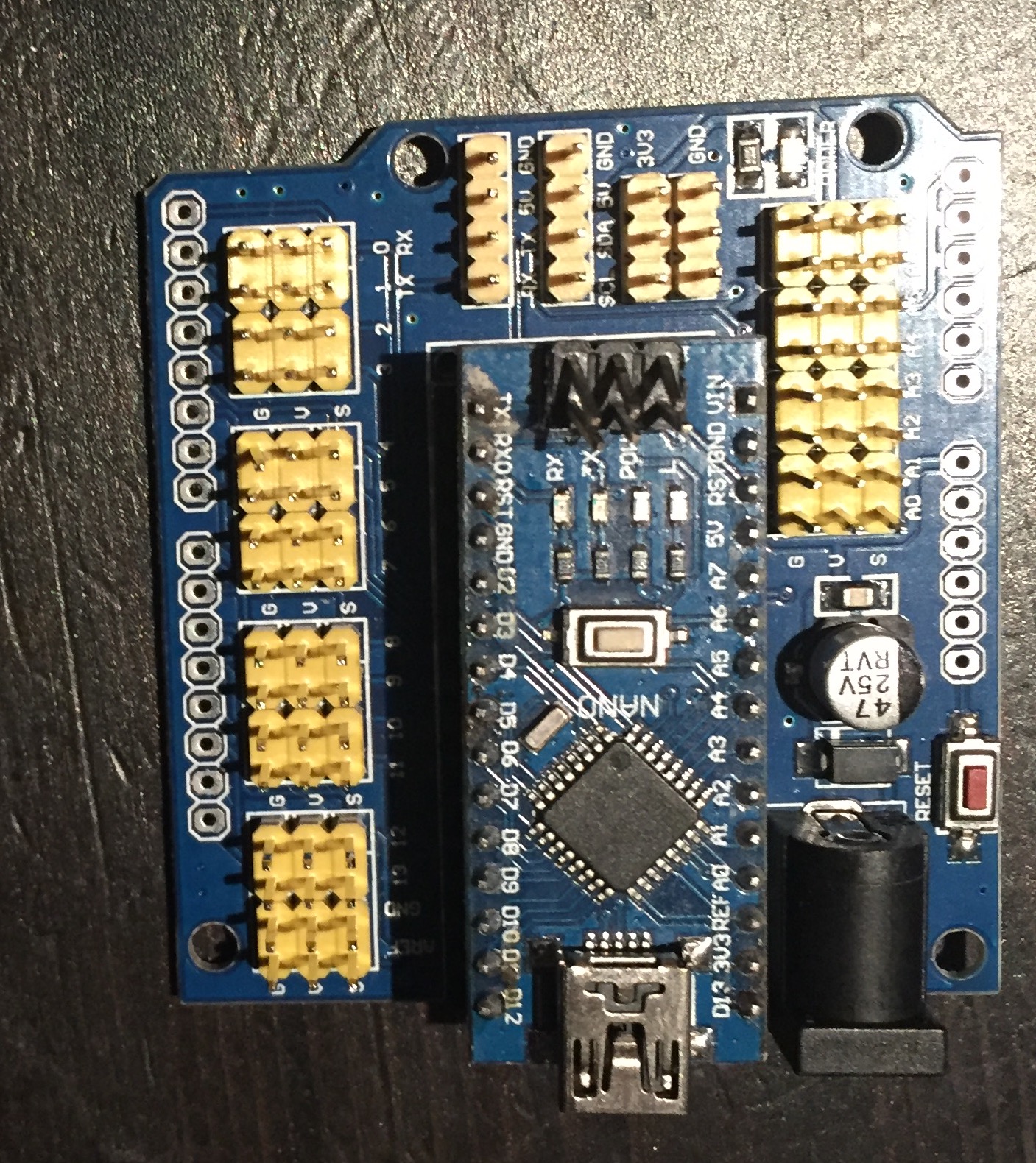
Arduino Nano
It tells everything what to do and is the base for all the other components. Everything is plugged into it and it receives and interprets the code so it can tell everything else what to do.
Wires
Connects different components to one another and sends electricity (power) to different areas.
Hot Glue Gun and Glue (optional)
Can use to stick the finger down to the board so you don't have to constantly get the right tension on the wire. Can also use sticky tape, double sided tape, blue-tack or anything to stick the components down ‐ Hot Glue just works because it is pretty strong.
Arduino App
Lets you write the code for your Arduino.
Glove
Means you can have your Flex Sensor on your finger without having to hold it there.
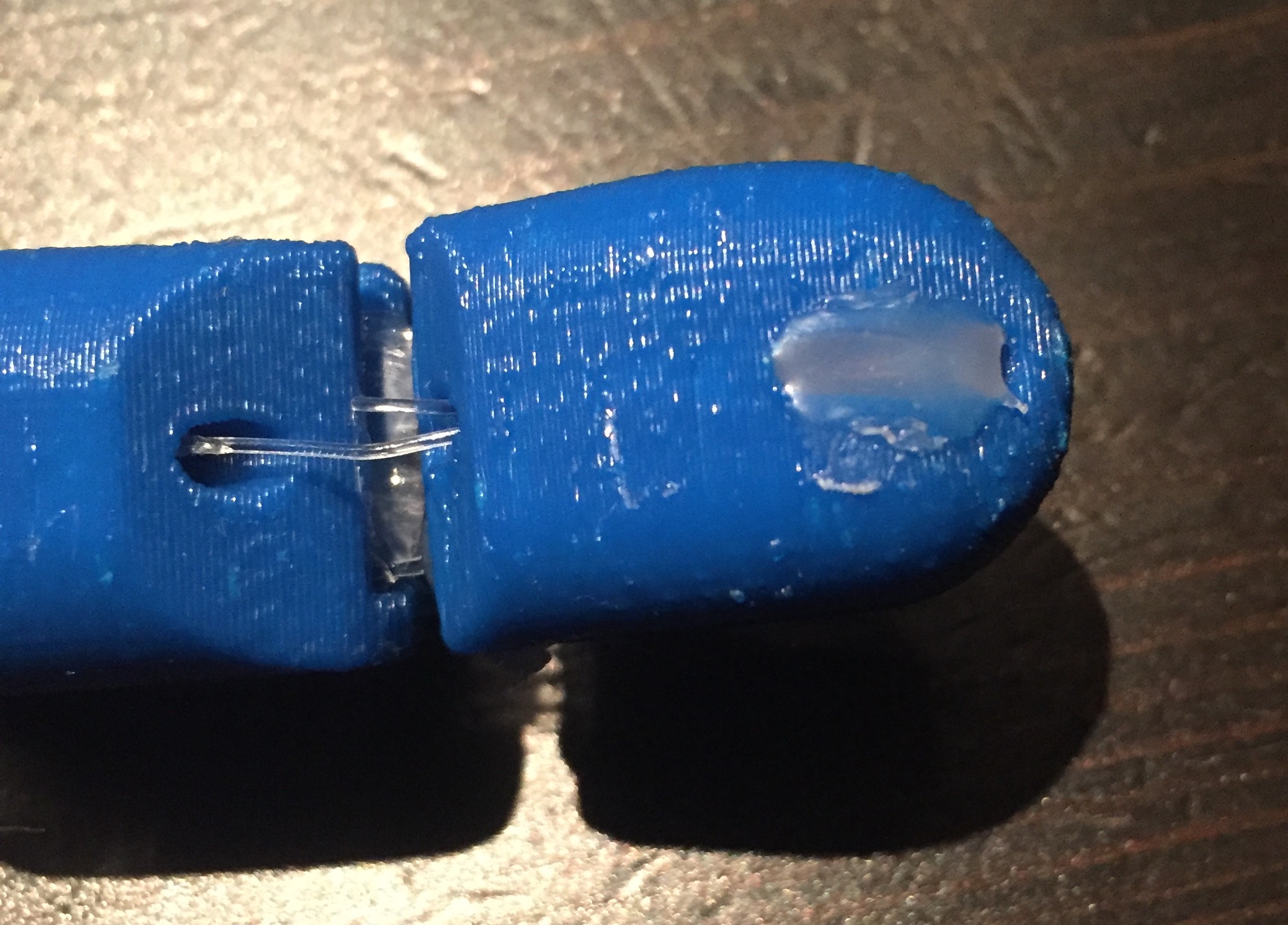
Flexible Plastic
Use it in the joints of your Finger to hold them together so you can bend it but it will return to its original position. About 1 cm wide and have enough in case you make mistakes (about 50 cm).
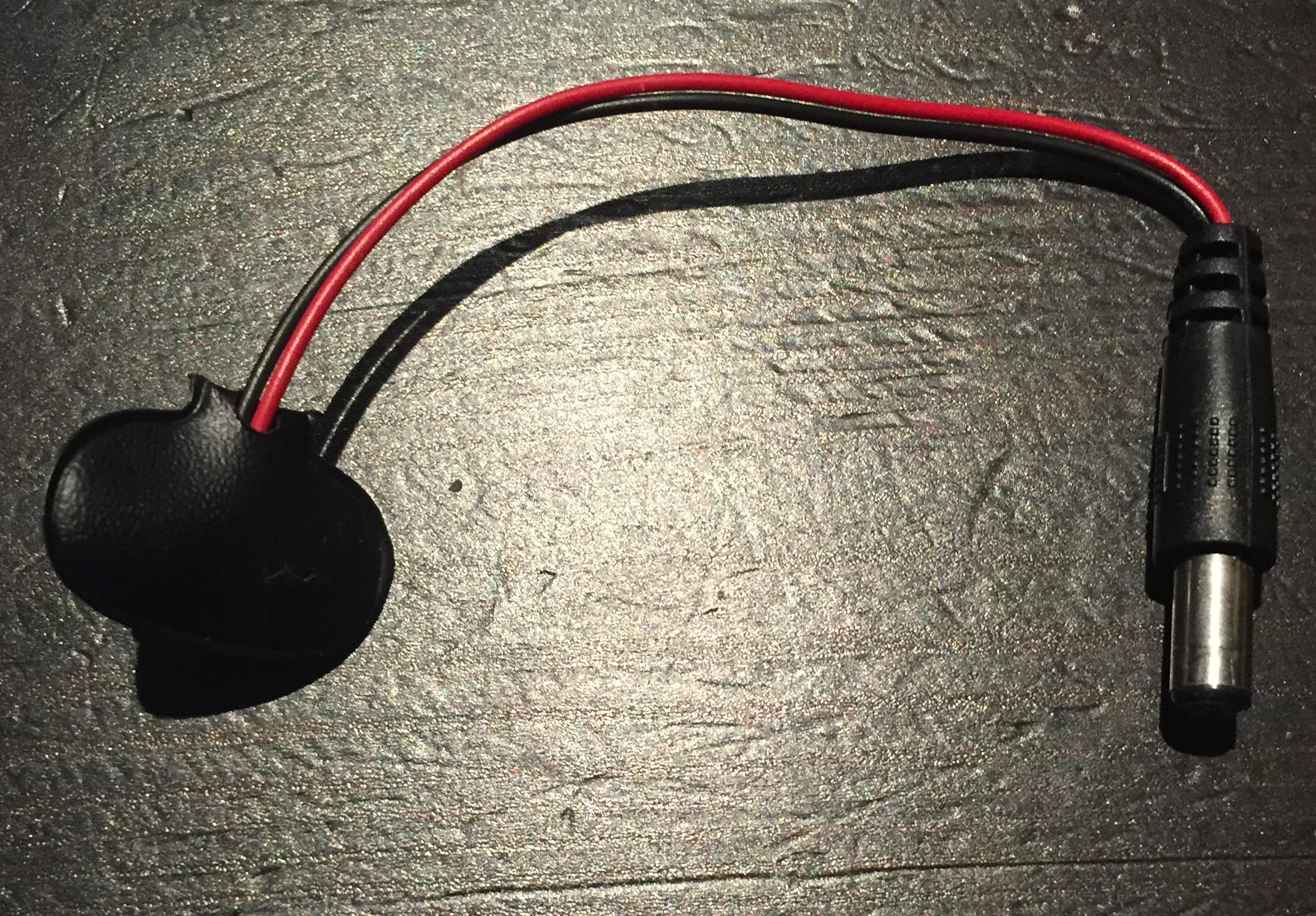
Battery Socket
Use to connect the Arduino to the power source (the battery).
Construction
Note: if using a straw or cardboard finger, you don't need steps 1-4. See troubleshooting for how to thread your finger.
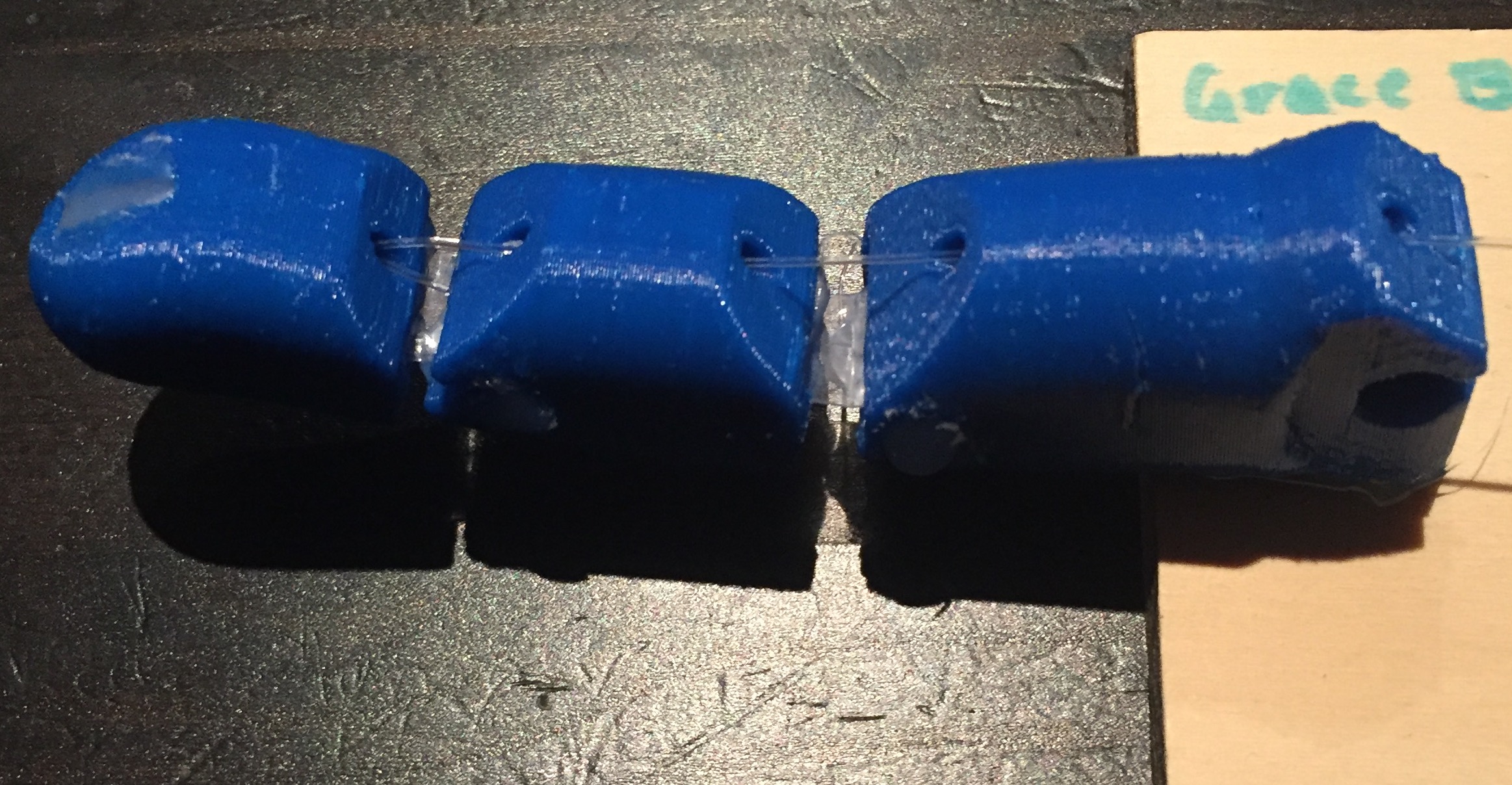
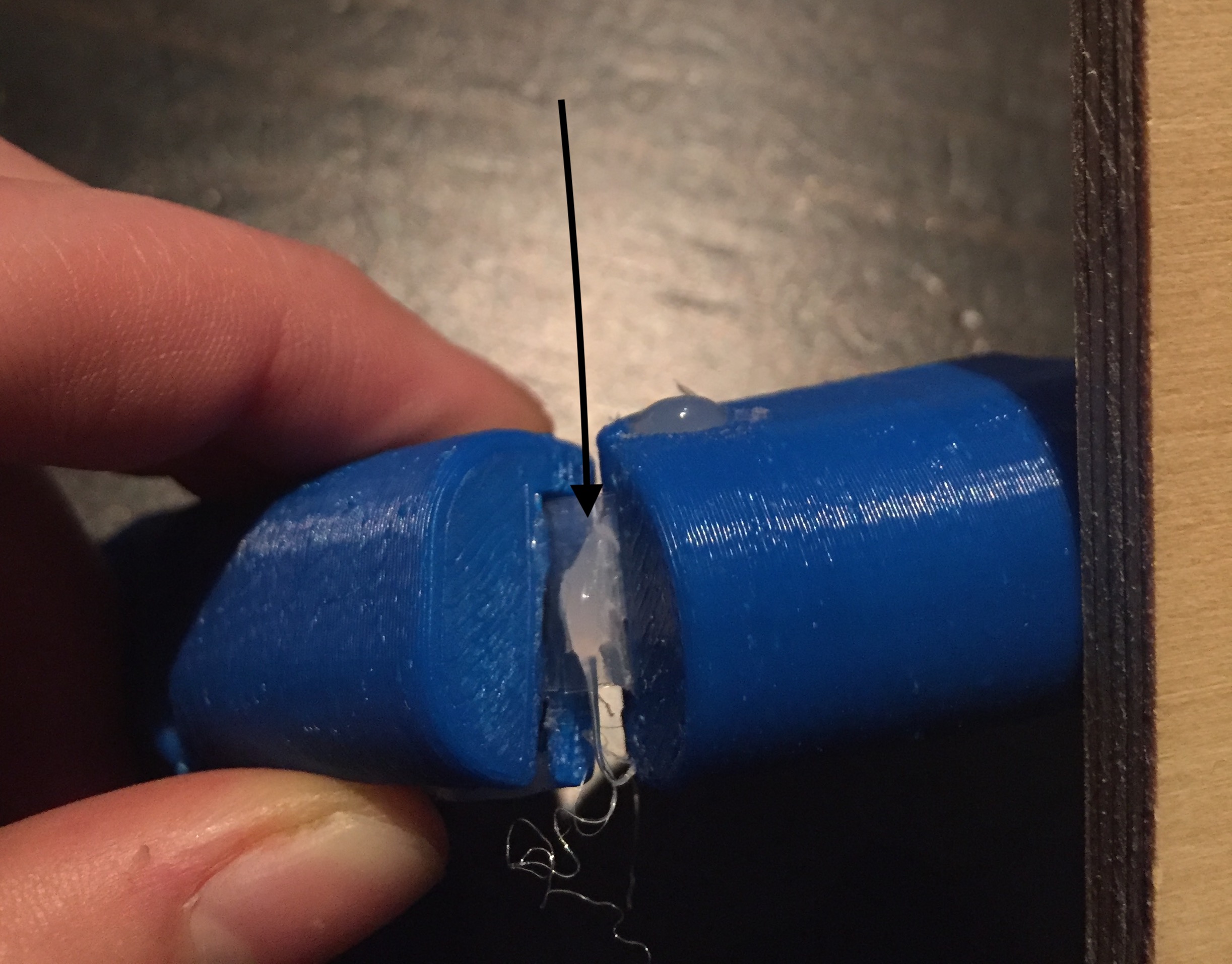
Place the end of the flexible plastic into the bottom joint. Cut it about 4 cm from the top of the joint. Place the next joint on top. See how much is in between the edge of the two joints, try and get it to about 0.5 mm. Cut it down to try again
Repeat step 1 for the next joint
Feed the wire from the bottom of the finger to the finger-tip (doesn't matter which hole.) And then down the other hole at the tip of the finger.
I hot glued the wire down at the top of the finger (the part where it emerged when it was thread through the holes) but you could tape it.
Tie the string onto one end of one of the Micro Servo 'arms'. Can glue or tape to secure.
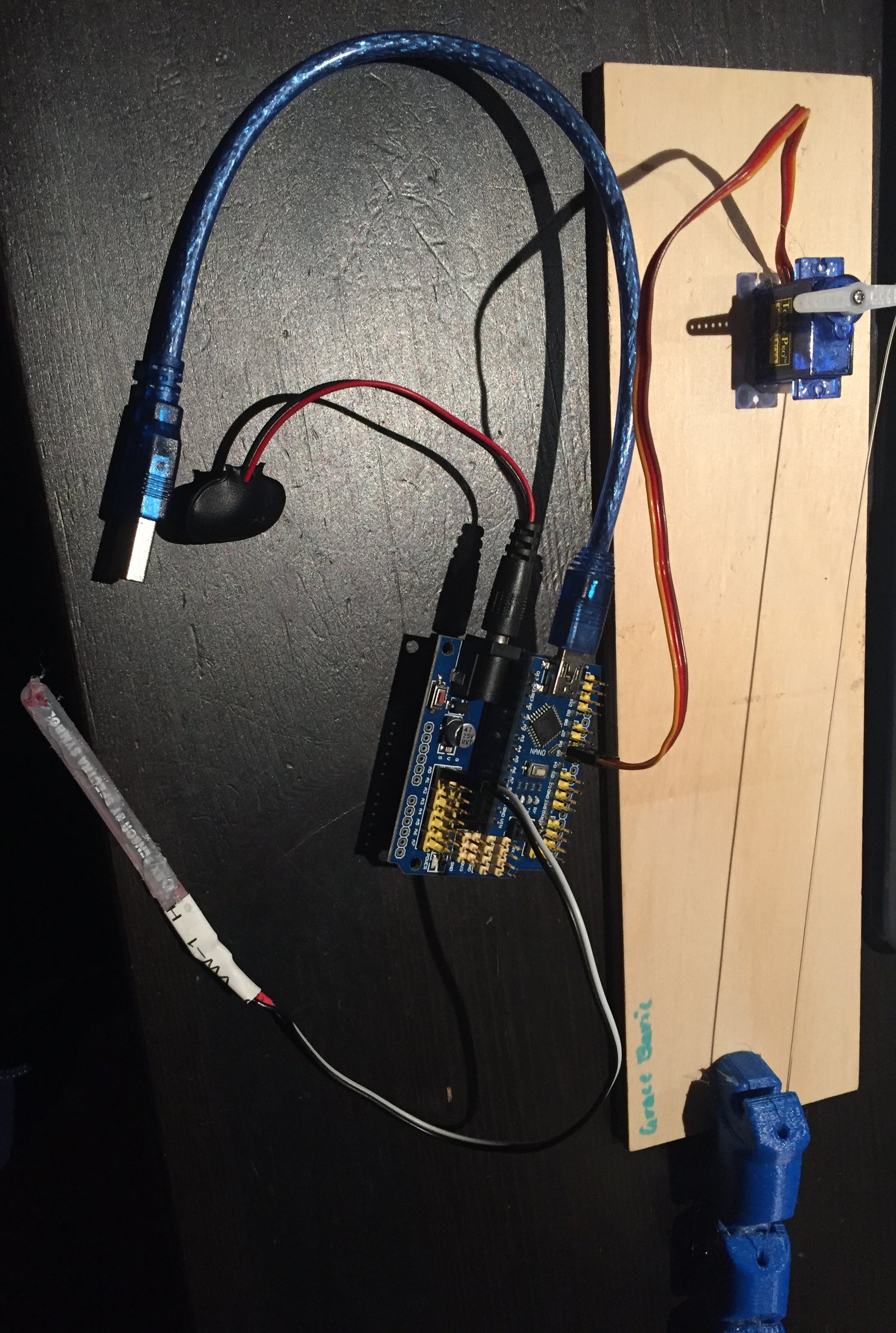
Stick the finger to your wooden board (I hot glued) at the top of the board, via the bottom part.
Stick the Micro Servo to the wooden board at a distance so that when the finger is fully extended, there is no slack in the wire.
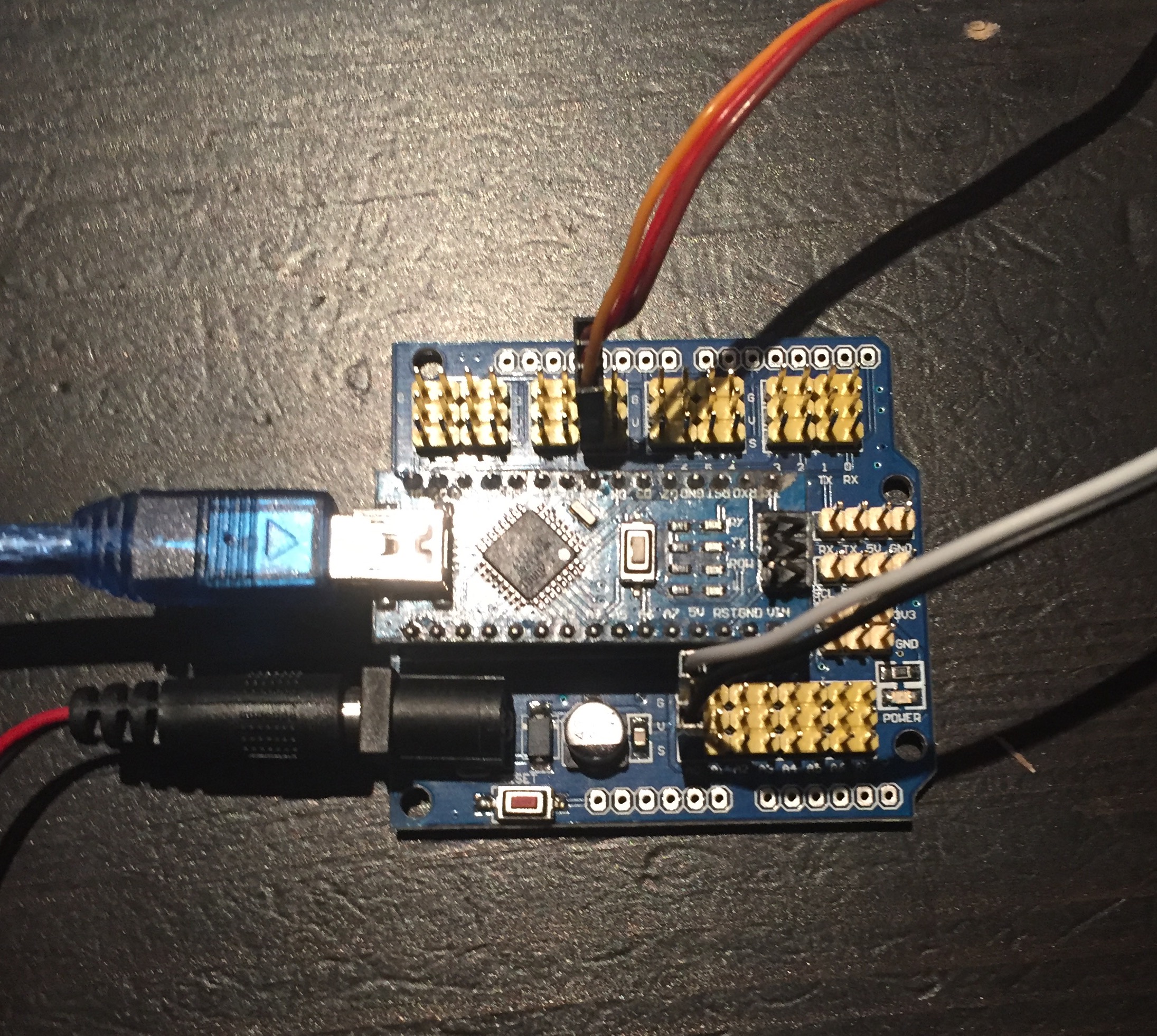
Find where it says 'A0' on your board and stick the flex sensor sockets into the two outside ones, it doesn't matter which is which.
Plug your Micro Servo into where it says '9' and have the brown wire line up with the the 'G' (brown goes to ground).
Plug your battery socket into the circular black socket on your Arduino Board.
Plug in your battery
Now you're ready to download your code! Do this by pressing the arrow pointing right in the top left corner of the window.
Explaining the Arduino Code
#include <Servo.h>
Includes the Micro Servo library
Servo myservo;
This makes an element for your Micro Servo which will let you control it.
void setup() {
Something to setup your loop, that will run once.
myservo.attach(9);
Lets the Arduino know that the Micro Servo is attached to Pin 9.
pinMode(A0, INPUT_PULLUP);
Tells the Arduino that the Flex Sensor will be providing information instead of acting on it.
Serial.begin(9600);
How quickly the data will go between the Flex Sensor and the Micro Servo so it doesn't overload.
}
void loop() {
Instructions that the Arduino repeats.
int flexSensor = analogRead(A0);
Sets the flex sensor to A0 and lets it be constantly read.
int angle = (flexSensor - 250);
This is what you calibrate when you calibrate. '250' is basically when the Micro Servo is fully turned. '250' is when the Flex Sensor is fully bent.
Serial.println(angle);
Tells the information to the Serial Monitor so you can read it!
myservo.write(angle);
Makes the Micro Servo turn however much the Flex Sensor has bent.
}
If you're still a bit confused or want to learn more, you can watch this video
Why your finger may not be working
Make sure your code is correct. By this I mean having no extra spaces, making sure you have semi-colons at the end of every line. Basically, just make it try to look like mine to begin with and then you can experiment. Make sure you have the latest version of the Arduino app and sometimes you might have to put it on old bootloader. In the menu bar of your Mac, go Tools > Processor > ATP328 (Old Bootloader).
Calibration: If you open the Serial Monitor (Looks like a magnifying glass in the top right corner of Arduino App) (when your Arduino is plugged into your laptop), and you bend the flex sensor all the way, you can then see, looking at the numbers on the serial monitor, adjust the number mentioned before (In the line int angle = (flexSensor - 250);) to the number you see on the monitor. It may require some tweaking and you might need to play around with it.
Make sure that the components are plugged into the right pin (the one you chose in your code)
Is your Arduino plugged into a power source (either your laptop or a battery pack)?
If this message comes up: avrdude: skt500_recv(): programmer is not responding; you can click here
Make sure not of the metal spokes on your Arduino Board are touching another, otherwise it will short circuit
With straw fingers, you make your joints by cutting a little diamond in the straw, 1/3 the way down, then one 2/3 the way down. Feed the wire through so there is a lot of string out at the bottom and enough at the top to fold the string over and stick it on the front (in line with the joints). Should look like a finger version of this hand (click here)
With a cardboard finger, make a fold 1/3 and 2/3 down the finger and then stick a small section of straw (hot glue would work best) in every section and then feed the string through leaving a lot at the bottom and enough at the top to fold over and stick down, on the same side as, and in line with the straw bits. A bit like this hand (click here)
If your Arduino starts doing something funny, for example, smoking, unplug it from the power source if it seems safe and get the help of a trusted adult.
Looking for a bit of Extension?
You may be able to make 4 other fingers (one with only one joint for the thumb) and try to make a whole hand. You would have to experiment with different void loops and try and work out how to have different Flex Sensors matched with different Micro Servos. Or you could experiment with different materials to see if they work better in your hand. For example, if you made a finger with a straw try making one with a 3D printed finger or vice versa or maybe trying it with different materials to stretch it. You may also want to print another finger to make it better than the one you had before, for example, you might be able to make the joints move better.